Nebenschlussmotor
Beim Nebenschlussmotor sind Statorwicklung und Ankerwinklung parallel geschaltet.
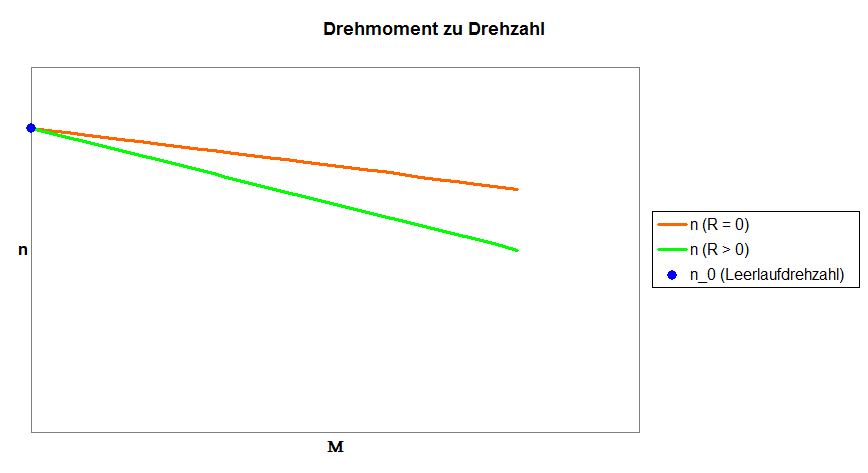
Bei großen Nebenschlussmotoren ist das Drehmoment nahezu unabhängig von der Drehzahl und proportional zur Versorgungsspannung. Sie eignen sich besonders für drehzahlvariable Antriebe von Maschinen mit konstantem Gegenmoment (z.B. Förderbänder oder Walzwerkzeuge).
Ein Betrieb an Wechselspannung ist nur schlecht möglich. Der Erregerstrom hat wegen der großen Induktivität einen hohen Blindanteil, wodurch Erreger- und Ankerstrom phasenverschoben zueinander sind.Bei geringer Last wird der Strom durch die Ankerspule immer größer und der Strom durch die Erregerwicklung immer kleiner. Dadurch bricht das Erregermagnetfeld zusammen, bis sich bei gar keiner Last die Leerlaufdrehzahl (n0) einstellt.
Nebenschlussmotoren können selbsterregt (gleiche Versorgungsspannung Erreger- und Ankerkreis) oder fremderregt (unterschiedliche Versorgungsspannung Erreger- und Ankerkreis) ausgeführt werden.
Die Zeichnung zeigt das vereinfachte Ersatzschaltbild eines selbsterregten Nebenschlussmotors. Die Anschlüsse der Erregerspule heißen hier E1 und E2.
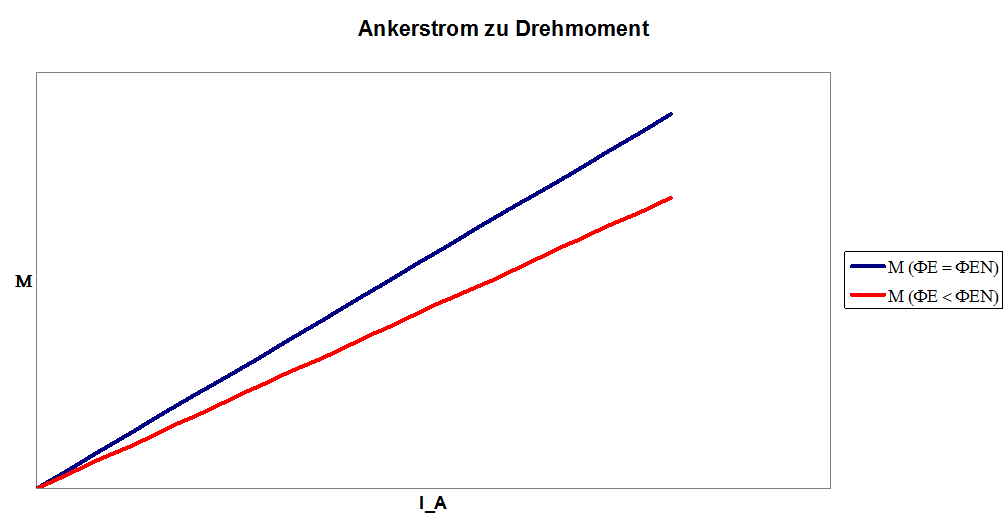
Beim Nebenschlussmotor ist das Erregerfeld konstant, dadurch ergibt sich ein linearer Zusammenhang zwischen dem Motormoment (M) und dem Ankerstrom. (IA).
Die rote Kennline zeigt das Motorverhalten bei einer Verringerung des magnetischen Flusses durch die Erregerspule; dieses kann durch eine Verringerung der Windungszahl erreicht werden. Beide Linien müssen Ursprungsgeraden sein, weil ohne Ankerstrom der Motor keine Kraft übertragen kann.
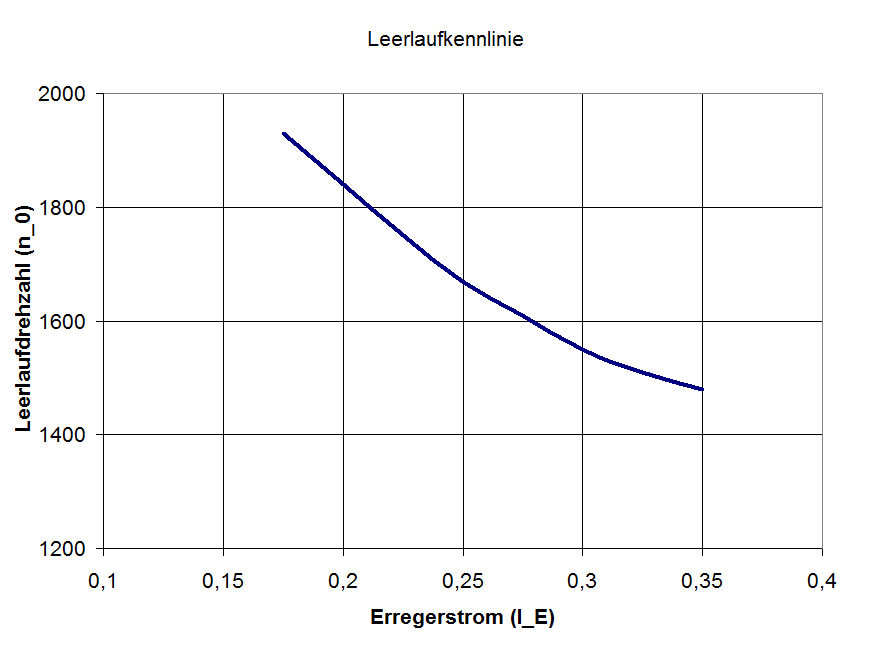
Im Leerlauf (ohne angeschlossene Last; M=0 und IA=0) stellt sich die Leerlaufdrehzahl ein. Diese ist abhängig vom ErregerstromIE.
Das folgende Diagramm zeigt den den Leerlaufdrehzahlverlauf bei verschiedenen Erregerströmen. Bei diesem Experiment darf der Erregerstrom nicht zu stark verringert werden, weil sonst das Drehzahlverhalten instabil wird und der Motor beschädigt werden kann.